This months newsletter is a bit later than last time... but I hope its worth the wait!
We have a new Javascript ISR calculator, every known trick for key matrix scanning and an LED matrix trick as well as some code for 3 phase AC motors.
Clock Speed divided by Prescale times Remaining RTCC Count equals the number of Timer Rollovers
Clock / (prescale * RETIW) = Interrupt Rate
But why mess with the math when this calculator does it for you? It's written in JavaScript so you can save it locally and not have to be connected to the internet to use it. You can look at the program (and modify it) by right clicking and selecting "View Source".
Dennis Crawley says:
"...Challenge: to desing a 4x4 matrix keyboard and LCD using only one port= 8 pins. Well, I have read for fun that "three-days-ping-pong", and finally "the curiosity killed the cat", so following Mike Rigby design I've arrived to a modest solution Features:
- - Only 7 pins and lets free RB0.
- - Use BF to detect internal operation. (saving an extra pin if it is not used)
- - Only 8 diodes as extra components.
- - Just take a look and tell me how to speed it up or generate a decoder routine :)
Have fun!
Dennis Crawley
PD:I'd like to thank all of you, for your generosity and your patience with "rocky" people like me.
; PortB is used as follows: ; RB0 FREE ; RB1 LCD ENABLE ; RB2 LCD R/W ; RB3 LCD RS ; < LCD DATA BUS > ; D7 D6 D5 D4 ; | | | | ; RB4 ---------o------|-------|--|---------|-,--|-,--|-,--|-,- ; | | | | 0|/ 1|/ 2|/ 3|/ ; RB5 --o------|------o-------|--|---------|-,--|-,--|-,--|-,- ; | | | | | 4|/ 5|/ 6|/ 7|/ ; RB6 --|--o---|------|-------o--|---------|-,--|-,--|-,--|-,- ; | | | | | | 8|/ 9|/ A|/ B|/ ; RB7 --|--|---|--o---|--o----|--o---------|----|----|----|--- ; _|_ | _|_ | _|_ | _|_ | C| D| E| F| ; \ / | \ / | \ / | \ / | | | | | ; _V_ | _V_ | _V_ | _V_ | | | | | ; | _|_ | _|_ | _|_ | _|_ | | | | ; | \ / | \ / | \ / | \ / | | | | ; | _V_ | _V_ | _V_ | _V_ | | | | ; | | | | | | |__|_________| | | | ; |__| |__| |__|______________________| | | ; | |__________________________________| | ; |______________________________________________| ;This is the new scan table to read a 4x4 matrix keyb. ; SET READBACK HEX KEY ; RB7 RB6 RB5 RB4 RB7 RB6 RB5 RB4 ; 1 1 1 0 0 0 1 0 6 0 ; 0 1 0 0 4 1 ; 0 1 1 0 2 2 ; 1 0 0 0 8 3 ; 1 1 0 1 0 0 0 1 4 4 ; 0 1 0 1 5 5 ; 0 1 0 0 1 6 ; 1 0 0 1 9 7 ; 1 0 1 1 0 0 1 1 2 8 ; 0 0 0 1 1 9 ; 0 0 1 0 3 A ; 1 0 0 1 9 B ; 0 1 1 1 0 0 1 1 6 C ; 0 1 0 1 5 D ; 0 1 1 0 2 E ; 0 0 0 1 1 F
The source code for this turned out to be very difficult to convert (or understand) and so I'm not going to mess with it. I don't think software would be terribly hard to write from scratch and if enough people express an interest in it, I will do so.
It is also possible to read a keyboard without the LCD useing far fewer wires.
Scott Dattalo says:
If you use only the upper (or lower) triangle then you can get rid of the diodes. The downside is that the number of switches that you can scan is cut in half. However, that is still greater than the general X-Y scanning: for n lines
the maximum switches that the X-Y scanning method can scan is (n/2)*(n/2) = (n^2)/4 (if n is even).the maximum switches that can be scanned by using this 3-state logic is:
n*(n-1)/2 = (n^2)/2 - n/2 = (n^2)/4 + (n^2)/4 - n/2 = (n^2)/4 + n*(n/2-1)/2In other words, the 3-state logic will scan n*(n/2-1)/2 more switches.
If n is not even then the most you can scan with the X-Y approach is:
(n-1)/2 * (n+1)/2 = (n^2 -1)/4Putting into a table:
(ed: see below) # scanned double 3 state n X-Y 3 state diodes &ground ------------------ 4 4 6 12 10 5 6 10 20 15 (darn! almost had a hex pad) 6 9 15 30 21 7 12 21 42 28 8 16 28 etc... 9 20 37 10 25 45 11 30 55 12 36 66 13 42 79 14 49 91 15 56 105 16 64 120 (if I did this table correctly).
Eric Bohlman notes that you can add another column (or row) by connecting it to ground: "Assuming (without loss of generality) that you're driving the columns and reading the rows, you can tie one column low; if you see a low on the rows when you aren't driving any of the columns, it's a keypress on the tied-low column. This doesn't work too well if the row inputs are used for other purposes besides keyboard scanning, though sometimes you can get around it by tying the column low through a high-value resistor."
Combining Scott and Eric's comments you could do this:
0 1 2 3 GND
| | | | |
R R R R R
| | | | |
0---+--KEY-KEY-KEY-KEY-
| | | | |
1---+---+--KEY-KEY-KEY-
| | | | |
2---+---+---+--KEY-KEY-
| | | | |
3---+---+---+---+--KEY-
| | | | |
Weak pullups enabled, first read the port and check for any lows, this would be a key on the GND (far right) column. If all pins are high, ground pin 0 and any lows on 1 thru 3 would be a key in the top row. Then ground 1 and a low on 2 or 3 indicates the two keys on the second row (other than the last column), finally ground 2 and check the remaining key (on the third row) by reading back 3.
That is a 10 key pad in 4 IO lines with no external components other than the keys! And it means you can add the "n" column to the "3-state" column on every line of Scott's table.
Finally, as Eric notes, adding a resister in series with each column wire allows us to use the 4 IO lines for other functions as well. I wonder if a capacitor added to each column line would allow us to despinse with the debounce code? This design by Edson Brusque not only uses capacitors to cut down on switch bounce, he also uses them to hold the state of each row while switching to column scanning (see his comments below) which gives us 16 keys with only 4 IO lines! And we can use the 4 bits to drive the data bus for an LCD:
The only downside is the 8 Resistors, 4 diodes and 4 capacitors.
Edson says:
...here's how the scanning process for each keypad row line works. For this example, assume we want to check the keys connected to matrix keypad row line X1:1. First, set RD7:4 as outputs and drive them HIGH to pre-charge column storage capacitors C1-C4.
2. Wait about 10 microseconds, then set RD7:5 as inputs, leaving RD4 as an output.
3. Output a LOW on pin RD4; this discharges the storage capacitors associated with any keys that are pressed along keypad row X1, while leaving the remaining capacitors charged.
4. Wait about 40 microseconds, then set pin RD4 as an input.
5. Read Port D to obtain the key states. Any keys pressed along the X1 row line will be indicated by 0's in the Port D bit positions corresponding to their associated column lines Y1 through Y4; unpressed keys will be indicated by 1's in their respective bit positions.
6. Save the Port D key row data in memory somewhere.
7. Go back to Step 1 and repeat for the next keypad row line. Repeat until all four keypad row lines are done.
The secret to this scheme's success is that in between Step 4 and Step 5 above, storage capacitors C1 through C4 hold the key states.
The only programming precaution needed with this scheme is to take care not to allow too much time to elapse between Step 4 and Step 5; otherwise the voltage on capacitors C1 through C4 might change enough from port pin and diode leakage currents to affect the results. So if interrupts are used, they are best disabled during keypad scanning.
The only precaution needed in arranging the hardware is to refrain from using any of the keypad lines for the LCD's E strobe.
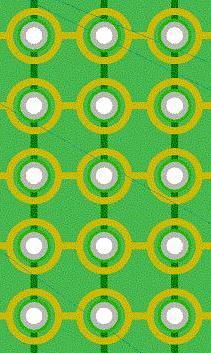
I've had another "interesting" idea for data entry on the cheap: A Matrix of copper traces on a PCB with a grounded test lead "stylus" that allows the SX to "follow" the tracing of the lead against the matrix. The center of each pad in the matrix is plated through to the vertical traces on the other side of the board and each pad is circled by a ring of copper on the top side and these rings are connected horizontally. The vertical and horizontal traces are connected to port pins so that as the test lead is dragged over the top of the board, as it contacts a ring or a pad, the pin attached to that row or column is pulled low.
No need for debounce, you just record the "last x" and "last y" and update them when ever a signal comes in. If neither a row or column update occurs in a certain time (count down timer) then the "pen" is assumed to be "up." Some care must be taken to ensure that the center pad is "hit" as you pass the "pen" from column to column. What I have found is that running a large (.2 or so) curve on the end of a metal ink pen case (with the inside removed) makes it very easy to "click" from hole to hole in the pattern of the digit you want to enter.
A 3 x 5 matrix should be enough for entering text and numbers and a 2x3 works fine for numbers.
The primary feature is low cost combined with easy, fast, data entry. One issue would be converting the pattern after a "pin up" into a letter or digit. I think following the path is a better idea:
 In this
illustration, the starting position has been shown in blue and the areas
that are traced over twice are shown in a darker red. The expected sequence
for a 1 is (2,1),(2,2),(2,3) and for an 8 is
(1,1),(1,2),(2,2),(2,3),(1,3),(1,2),(2,2),(2,1),(1,1). This might seem hard
to match at first, but if you realize that each of the coordinates is really
a single value (e.g. 1 is really 2*3 + 1 = 7 then 2*3 + 2 = 8 then 2 * 3
+ 3 = 9 so the sequence is 7,8,9) then you can use the keyword matcher at:
In this
illustration, the starting position has been shown in blue and the areas
that are traced over twice are shown in a darker red. The expected sequence
for a 1 is (2,1),(2,2),(2,3) and for an 8 is
(1,1),(1,2),(2,2),(2,3),(1,3),(1,2),(2,2),(2,1),(1,1). This might seem hard
to match at first, but if you realize that each of the coordinates is really
a single value (e.g. 1 is really 2*3 + 1 = 7 then 2*3 + 2 = 8 then 2 * 3
+ 3 = 9 so the sequence is 7,8,9) then you can use the keyword matcher at:
http://www.piclist.com/techref/piclist/codegen/keyword_interpreter.htm
to find each sequence. For this figure, you can see the result for 1 thru
0 by
clicking
here.
Here is some code to read and update the last known posiiton. This has not been tested!
mov temp, #$F8 ;assumes a 3 x 5 matrix; mask the top 5 first. mov w, port ;read the port test w ;check it sz ;and if zero do not clr count ; reset the counter dec count ;count down each time add w,temp ;if any bit was set in the top 5 bits, we will get a carry ;and the high 5 bits of W contain the column minus 1. ;(adding all bits = subtracting one) sc ;if we found a row contact do not not temp ; invert the mask. doesn't affect carry, inverts temp to $07 sc ;if we found a row contact do not and w, temp ; clear off the bits we added up top jz :none ;won't be if the and was skiped or if any lower bits in W are set ;update the last known position. This may change the top or bottom set of bits in pos ;but will not change both depending on the state of temp (e.g. temp may be $07 or $F8?) and w,temp ;turn off the other bits (high or low depending on what was found) or pos,w ;turn on any bits in pos that are on in W not temp ;swap the mask to the other set of bits or w,temp ;and turn on the other bits (high or low depending...) and pos,w ;turn off any bits in pos that are off in W
Anyway, it's just another crazy idea! <GRIN> But it might combine nicely with an LED matrix.
These neat methods can also be applied to LEDs. Imagine a 4x4 matrix where the four rows go to four I/O lines and the four columns do too. Put 12 LEDs at the non-diagonal junctions with the anodes connected to the columns.
0 1 2 3
| | | |
0---+--LED-LED-LED-
| | | |
1--LED--+--LED-LED- 4 lines, 4(4-1) = 12 LEDs
| | | |
2--LED-LED--+--LED-
| | | |
3--LED-LED-LED--+--
| | | |
You can turn on any LED at will. For example, if you bring line 0 high, line 1 low, and make lines 2 & 3 hi-Z inputs, then the top LED in the first column will light up.
Even though there appear to be multiple current paths, only one path has one LED, and once it lights, the others won't reach their threshold voltage. Pretty cool, huh?
Sadly, I don't see any way to combine this with a keyboard scanning matrix, so you would have to allocate seperate IO lines.z
And now for something completely different. Here is some nice code to generate
a 3-phase sine wave for big time electric motor control. This comes
from:
http://www.piclist.com/techref/member/hb-operamail-885/index.htm
and I converted it for the SX
; PIC 3-Phase generator by Helge Buen - buen@operamail.com ; I borrowed and altered the table lookup and it's driver code. It is Copyright 1995 Eric Smith ; Fixed PWM frequency 3-phase sine generator for electric motors etc.. The output frequency are generated by jumps in the ; sine lookup table. For example the lowest frequency will repeat each value 16 times (4096 values). The highest will do ; 15 and 16 jumps (only 16.5 values - maybe too few, not tested). All others generated by combinations of repeat/jump. ; The code is not tested in practice. ; Electric motors needs the voltage to follow the frequency. Therefore each sine value is multiplied by a factor (gain). ; The frequency (speed) and the gain variables are INDEPENDENT in the code. The simplest and most suitable would be to ; right rotate the gain into the speed variable. At a gain of 255 the controller would output 36 values a revolution at ; full voltage. If one want some voltage boost (motor torque) at particular conditions that is easy to implement too. ; Of course it would be interesting to monitor the speed of the motor and REDUCE voltage to save power on battry apps. ; This code generates 3 values ranging from 2 - 128 and 128-254. 128 is 0 volt and corresponds to the 50% PWM ratio (bridge). ; A separate PWM controller is required as it have to output some thousand pulses a second at 255 resolution ; The PWM controller should have fixed instruction number, master the time and clock the sine generator (handshake). ; It is an good idea to centre the PWM pulses to avoid simultaneously switching (noise) ; No speed ramping (frequency increment) is implemented, it should correspond the mecanical application. Hovever increasing ; the speed variable by one each revolution would be no problem. It is possible to alter the speed/gain at each PWM pulse, ; be aware! The 3 motor voltages should be output simultaneosly at the end. ; 08.09.01: PWM data preparation: ; Convertion of the voltage values into 4 delays and 2 data bytes. The purpose is to do as much processing as possible in ; the generator controller. At the same time not too much data should be created because of the transfer time to the PWM. ; The delays represent time between changes and the data is what to be output. The sum of all delays always is 256. Note: ; they are complements to 256 and 0 must be treated as zero delay. Usual method: before counting them up (incfsz), ; initially subtract 1 from all. Before counting down, add 1 to all. (Use decf/incf instead of movf at data transfer) ; Now, simply load 4 'counter' and 2 'data' registers in the PWM. Count first UP to zero, output data one, count next and so ; on. The third data output is given to be all set. This method introduce small errors, but i believe they are unessential ; to this application. Remember to compensate (at the other end) for the data transfer dead time. ; To implement centered pulses the 4 delays must initially be loaded twice, and second copy count DOWN at the 'mirror part'. ; The data must be inverted (comf). This also requires twice as fast controller. A 20MHz controller is beginning to reach ; the limit here if you want reasonable switching frequency (>3KHz). Another idea i had was to do the first PWM half in the ; generator, and the second in the PWM as the generator carry out processing. ; Note that there is only 3 outputs, but 6 are necessary for 3 phase output bridges. The additinal 3 signals are kind of ; inverted versions, but cross over delay must be insterted. That is a very short period where none of the transistor pairs ; are on, to protect them. I have no idea how long this period should be, but a very long period would decrease the dynamic ; range of the PWM. If someone has any experience about this, please let me know! Also ideas about fast paralell data ; transfers PIC to PIC wanted. The cross over delay and inverted signals could either be made in the PWM controller or in ; the transistor driver stage (depending on delay value). I think the PIC would do it most nice but, again, it's pretty busy. ; Outputs are delay1-4 and data 1-2. list p=16c55a ; Include file, change directory if needed org 8 ds zero ds temp equ $0009 ds angle equ $000A ds gain equ $000B ds volt1 equ $000C ds volt2 equ $000D ds volt3 equ $000E ds speed equ $000F ds lsbpos equ $0010 ds delay0 equ $0011 ds delay1 equ $0012 ds delay2 equ $0013 ds delay3 equ $0014 ds delay4 equ $0015 ds data0 equ $001A ds data1 equ $001B ds data2 equ $001C ; Start at the reset vector org $000 jmp start sinetbl: add PC, W retw 000h retw 003h retw 006h retw 009h retw 00Ch retw 010h retw 013h retw 016h retw 019h retw 01Ch retw 01Fh retw 022h retw 025h retw 028h retw 02Bh retw 02Eh retw 031h retw 033h retw 036h retw 039h retw 03Ch retw 03Fh retw 041h retw 044h retw 047h retw 049h retw 04Ch retw 04Eh retw 051h retw 053h retw 055h retw 058h retw 05Ah retw 05Ch retw 05Eh retw 060h retw 062h retw 064h retw 066h retw 068h retw 06Ah retw 06Bh retw 06Dh retw 06Fh retw 070h retw 071h retw 073h retw 074h retw 075h retw 076h retw 078h retw 079h retw 07Ah retw 07Ah retw 07Bh retw 07Ch retw 07Dh retw 07Dh retw 07Eh retw 07Eh retw 07Eh retw 07Fh retw 07Fh retw 07Fh retw 07Fh sort clr data0 ;Subroutine to sort PWM data. (see driver comments) mov W, volt1 mov delay0, W ;Presume volt1 is greatest setb data0.0 ;And set it's output mov W, volt2 mov W, delay0-w ;Test volt2 against volt1 snb Z ;Equal? setb data0.1 ;Yes, just set that bit too (They share delay) snb C ;Volt2 greater? jmp test3 ;No, go testing volt3 rl data0 ;Yes, change output (Carry known to be zero) mov W, volt2 mov delay0, W ;And correct delay test3 mov W, volt3 mov W, delay0-w ;Test volt3 against the greatest snb Z ;Equal? setb data0.2 ;Yes, just set that bit too (They share delay) snb C ;Volt3 greater? jmp diff ;No, go calculate difference clr data0 setb data0.2 ;Yes, set that output mov W, volt3 mov delay0, W ;And correct delay diff mov W, delay0 ;Get result mov W, zero-w ;Complement and.. add volt1, W ;..calc. DIFFERENCE to next (included voltage(s) are zeroed and excluded in next sort) add volt2, W add volt3, W retw 0 start: clr zero clr angle clr lsbpos mov W, #127 mov speed, W ; Desired motor frequency. Values above 127 may generate too few sine values?? (<36 a revolution) mov W, #255 mov gain, W ; Desired motor voltage. Should follow the frequency (max desired speed -> gain=255) frame mov W, angle mov temp, W ; copy the angle snb temp.6 ; is angle in the 2nd or 4th quadrant? mov W, zero-w ; yes, complement it to reduce to 1st or 3rd and W, #07fh ; reduce to 1st quadrant call sinetbl ; get magnitude clr volt1 ; empty the output clrb C ; Multiply the gain.. snb gain.0 add volt1, W rr volt1 clrb C snb gain.1 add volt1, W rr volt1 clrb C snb gain.2 add volt1, W rr volt1 clrb C snb gain.3 add volt1, W rr volt1 clrb C snb gain.4 add volt1, W rr volt1 clrb C snb gain.5 add volt1, W rr volt1 clrb C snb gain.6 add volt1, W rr volt1 clrb C snb gain.7 add volt1, W mov W, >>volt1 snb temp.7 ; was angle in 3rd or 4th quadrant? mov W, zero-w ; yes, complement it xor W, #128 ; align to center mov volt1, W mov W, #85 ; 120 degrees offset for phase 2 add W, angle mov temp, W snb temp.6 ; is angle in the 2nd or 4th quadrant? mov W, zero-w ; yes, complement it to reduce to 1st or 3rd and W, #07fh ; reduce to 1st quadrant call sinetbl ; get magnitude clr volt2 ; empty the output clrb C ; Multiply the gain.. snb gain.0 add volt2, W rr volt2 clrb C snb gain.1 add volt2, W rr volt2 clrb C snb gain.2 add volt2, W rr volt2 clrb C snb gain.3 add volt2, W rr volt2 clrb C snb gain.4 add volt2, W rr volt2 clrb C snb gain.5 add volt2, W rr volt2 clrb C snb gain.6 add volt2, W rr volt2 clrb C snb gain.7 add volt2, W mov W, >>volt2 snb temp.7 ; was angle in 3rd or 4th quadrant? mov W, zero-w ; yes, complement it xor W, #128 ; align to center mov volt2, W mov W, #170 ; 240 degree offset for phase 3 add W, angle mov temp, W snb temp.6 ; is angle in the 2nd or 4th quadrant? mov W, zero-w ; yes, complement it to reduce to 1st or 3rd and W, #07fh ; reduce to 1st quadrant call sinetbl ; get magnitude clr volt3 ; empty the output clrb C ; Multiply the gain.. snb gain.0 add volt3, W rr volt3 clrb C snb gain.1 add volt3, W rr volt3 clrb C snb gain.2 add volt3, W rr volt3 clrb C snb gain.3 add volt3, W rr volt3 clrb C snb gain.4 add volt3, W rr volt3 clrb C snb gain.5 add volt3, W rr volt3 clrb C snb gain.6 add volt3, W rr volt3 clrb C snb gain.7 add volt3, W mov W, >>volt3 snb temp.7 ; was angle in 3rd or 4th quadrant? mov W, zero-w ; yes, complement it xor W, #128 ; align to center mov volt3, W call sort ;Format voltages to PWM delays and data to disengage PWM controller. mov W, delay0 mov delay1, W ;Store first delay mov W, data0 mov data1, W ;Store first data call sort mov W, delay0 mov delay2, W ;Store second delay mov W, data0 or W, data1 ;Include first and.. mov data2, W ;..store second data (Third data is given to be simply all switched on) clr W ;Find the third delay by checking data. If all set -> zero. (Shared with another) sb data2.0 mov W, volt1 sb data2.1 mov W, volt2 sb data2.2 mov W, volt3 mov delay3, W add W, delay1 ;Calculate the fourth delay (sum of previous and this delay -> 256) add W, delay2 mov W, zero-w ;Complement mov delay4, W mov W, speed ; Lookup table pattern generator.. add lsbpos, W snb DC inc angle mov W, <>speed and W, #15 add angle, W jmp frame END
| file: /Techref/new/letter/news0303.htm, 29KB, , updated: 2016/7/6 10:45, local time: 2025/10/31 10:17,
216.73.216.87,10-2-37-96:LOG IN
|
| ©2025 These pages are served without commercial sponsorship. (No popup ads, etc...).Bandwidth abuse increases hosting cost forcing sponsorship or shutdown. This server aggressively defends against automated copying for any reason including offline viewing, duplication, etc... Please respect this requirement and DO NOT RIP THIS SITE. Questions? <A HREF="http://www.piclist.com/techref/new/letter/news0303.htm"> Massmind news letter, March 2003</A> |
| Did you find what you needed? |
|
o List host: MIT, Site host massmind.org, Top posters @none found - Page Editors: James Newton, David Cary, and YOU! * Roman Black of Black Robotics donates from sales of Linistep stepper controller kits. * Ashley Roll of Digital Nemesis donates from sales of RCL-1 RS232 to TTL converters. * Monthly Subscribers: Gregg Rew. on-going support is MOST appreciated! * Contributors: Richard Seriani, Sr. |
|
The Backwoods Guide to Computer Lingo |
.